IR-Sensor Teil 1
BOB3 hat einen IR-Sensor, der aus zwei Teilen besteht: eine IR-Sende-Led und ein schwarzer IR-Fototransistor.
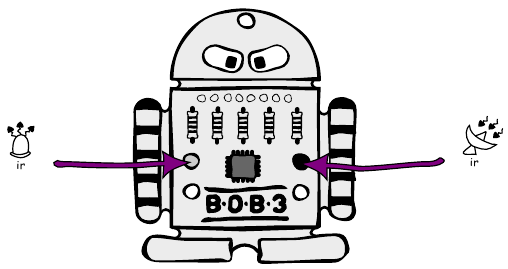
Die Sende-Led sendet IR-Licht aus. Dieses Licht wird dann von Objekten in der Umgebung zurückreflektiert und mit dem Fototransistor wieder empfangen:
Wenn man die Hand nah vor die Sensoren hält, empfängt der Fototransistor viel reflektiertes IR-Licht.
Hält man die Hand weiter entfernt von den Sensoren, empfängt der Fototransistor weniger reflektiertes IR-Licht.
Mit der Methode bob3.getIRSensor(); können wir abfragen, wieviel reflektiertes IR-Licht empfangen wird!
In Zeile 10 fragen wir den Fototransistor, wieviel IR-Licht er aktuell empfängt:
bob3.getIRSensor();
Diesen Wert speichern wir dann in der Variablen irWert:
int irWert = bob3.getIRSensor();
In den Zeilen 13 bis 17 programmieren wir die Reaktion des Roboters auf den jeweiligen Sensorwert:
Falls der Wert größer als 8 ist,
if (irWert > 8)
ein Objekt also nah am Sensor ist,
dann sollen beide Augen rot leuchten:
bob3.setEyes(RED, RED);
Falls nicht,
else
die Objekte also weiter weg sind,
dann sollen beide Augen aus sein:
bob3.setEyes(OFF, OFF);
Wenn alles geklappt hat, dann reagiert er jetzt z.B. auf den Abstand zu deiner Hand! Falls es mit der Hand nicht gut funktioniert, probier es mal mit einem weißen Blatt Papier!
Tip: Bei abgestecktem Helm muss der Jumper in ON-Stellung gesteckt sein!
„Hilfe, bei mir klappt das nicht...“
Was passiert, wenn man in Zeile 13 die 8 durch eine 2 ersetzt?